Traagheidsmoment
Het (massa)traagheidsmoment geeft de mate van verzet tegen verandering van hoeksnelheid van een lichaam met een zekere massa.
Een object met een zekere uitgebreidheid ten opzichte van een gekozen rotatie-as, verzet zich tegen verandering van de hoeksnelheid om die as. De mate waarin dit gebeurt wordt uitgedrukt in het (massa)traagheidsmoment ten opzichte van die rotatie-as.
Om de snelheid van draaien te veranderen moet een krachtmoment worden uitgeoefend (soms draaimoment genoemd). De verhouding tussen dit krachtmoment en de resulterende hoekversnelling is het massatraagheidsmoment ten opzichte van de rotatie-as.

Daarin is:
- het krachtmoment, een vector (in Nm)
- het massatraagheidsmoment, een getal (in kg·m²)
- de hoekversnelling, een vector (in rad/s²)



Het traagheidsmoment is het analogon (overeenkomstig begrip) van het begrip 'trage massa', dat de mate van verzet tegen lineaire versnelling uitdrukt, zoals weergegeven in de tweede wet van Newton: . Het traagheidsmoment is zowel afhankelijk van de totale massa als van de verdeling van deze massa; hoe verder een deel van de massa verwijderd is van de rotatie-as, hoe groter de bijdrage van dat deel aan het traagheidsmoment. Voor puntmassa's op respectievelijk afstanden van de rotatie-as is het traagheidsmoment de som van de aparte traagheidsmomenten:




Nu zijn puntmassa's meestal slechts idealiseringen en wordt een object beschreven door zijn massaverdeling (de massa als functie van de plaats ) of door de dichtheid . Het traagheidsmoment is dan gegeven door:




waarbij de loodrechte afstand tot de draaias voorstelt en de massadichtheid is.

Algemeen geldt:
![{\displaystyle I=\iiint _{V}[R({\vec {r}})]^{2}\rho (r)\mathrm {d} ^{3}{\vec {r}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/3b38800d720d69274a2db83a31a88f765addf101)
waarbij de afstand is van punt tot de draaias.

Verband met het impulsmoment
Het impulsmoment van een star, roterend object verandert volgens

met het verband tussen de hoekversnelling en hoeksnelheid


volgt door gelijkstellen aan de uitdrukking voor het krachtmoment

Daarin is:
- het impulsmoment, een vector (in N·m·s);
- de tijd (in s), een scalair;
- het krachtmoment, een vector (Nm);
- de hoekversnelling, een vector (in rad/s²)
- de hoeksnelheid, een vector (in rad/s)
- het traagheidsmoment, een scalair (in kg·m²)


Zie ook rotatie (eendimensionaal).
Traagheidsmoment als tensor
Als de rotatieas een as van rotatiesymmetrie is, zoals in bovenstaande uitdrukking voor het impulsmoment, dan is het traagheidsmoment een scalar, dat wil zeggen een evenredigheidsfactor tussen de impulsmomentvector en de rotatievector , die parallel staan.
Roteert het lichaam niet ten opzichte van de traagheidsas, dan moet het verband tussen impulsmomentvector en de rotatievector uitgedrukt worden als een traagheidstensor en kan men het traagheidsmoment voor elke willekeurige draairichting in één grootheid uitdrukken:

Deze traagheidstensor kan voor bewegingen in drie dimensies geschreven worden als een tensor bestaande uit 3×3=9 getallen en geeft dan de drie componenten van het traagheidsmoment L in het gekozen assenstelsel.
- ,

waarbij in een cartesisch coördinatenstelsel met het zwaartepunt van het lichaam als oorsprong voor een star lichaam, bestaande uit N puntmassa’s:






Altijd geldt: , , en .



is dus een symmetrische tensor. Voor continue massaverdelingen moeten deze sommaties vervangen worden door integralen. Vallen de gekozen coördinaatassen samen met de traagheidsassen (waarvan er altijd minstens drie bestaan), dan zijn de niet-diagonale elementen van de tensor gelijk aan nul. Het product van de diagonale tensor en de rotatievector resulteert dan in een die parallel is aan . Een rotatiesymmetrieas is altijd een traagheidsas.
 Zie ook rotatie (algemeen)
Zie ook rotatie (algemeen)Traagheidsmomenten van diverse lichamen
| Afbeelding | Beschrijving | Traagheidsmoment(en) |
|---|---|---|
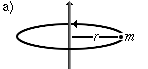 | Een puntmassa op afstand van de draaias. | |
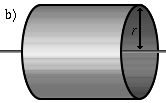 | Een cilindermantel die om zijn (cilinder)as draait. | |
 | Een massieve cilinder (staaf, schijf) die om zijn as draait. | [1] |
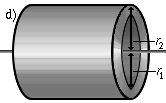 | Een holle cilinder die om zijn as draait. | [2][3] (m: massa van de holle cilinder) |
 | Een massieve cilinder die roteert om de symmetrieas die de cilinderas in het midden loodrecht doorsnijdt. | |
 | Een cilindermantel, die roteert om de symmetrieas die de cilinderas in het midden loodrecht doorsnijdt. | |
 | Een dunne staaf die draait om de symmetrieas die de cilinderas in het midden loodrecht doorsnijdt. (Merk op dat deze formule een benadering is van de cilinder met de aanname dat ) | [4] |
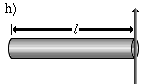 | Een dunne staaf die draait om een van zijn uiteinden. | [4] |
 | Een holle bol met verwaarloosbare dikte en een draaias door het middelpunt. | [5] |
 | Een massieve bol met een draaias door het middelpunt. | [6] |
 | Een plaat met lengtes en en draaias loodrecht op de plaat (vergelijk dunne ronde staaf). | [7] |
| Dunne schijf met straal en massa (gelijk aan massieve cilinder). | ||
 | Circulaire kegel met straal , hoogte en massa , die draait om z'n as. | [8] [8] |
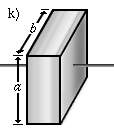
| massieve balk, hoogte , breedte , dikte en massa (vergelijk plaat). |
























Het traagheidsmoment om een andere as kan bepaald worden via de stelling van Steiner.
Voorbeelden van berekeningen
Massieve cilinder

Een massieve, homogene cilinder heeft lengte , straal en dichtheid . Het traagheidsmoment om zijn as kan berekend worden door de bijdragen van de kokers met schildikte en straal te integreren. Voor het (infinitesimale) volume van zo'n koker geldt:




- .

Het traagheidsmoment is dan:

De massa van de massieve cilinder bedraagt

Samen levert dit op

Dunne staaf en draaiingsas haaks op midden

Een homogene staaf ter lengte en doorsneeoppervlak kunnen we als een rol koekjes opgebouwd denken uit schijfjes. Het traagheidsmoment om de draaiingsas kan berekend worden door de bijdragen van de schijfjes met dikte te integreren. Voor het (infinitesimale) volume van zo'n schijfje op een afstand van de as geldt:

- .

Het traagheidsmoment is dan bij benadering:

De massa van de massieve staaf bedraagt

dus

Massieve bol

Het traagheidsmoment van een massieve bol met massa m en straal R om een willekeurige as door het middelpunt wordt als volgt gevonden. Stel dat Oz de draaiingsas is. Voor de afstand van het punt r = (x,y,z) tot de as Oz geldt

- .

Het traagheidsmoment om de z-as wordt gegeven door:

- ,

waarbij geïntegreerd wordt over de massieve bol. Dat kan eenvoudig door te bedenken dat we bolsymmetrie hebben, zodat de traagheidsmomenten om alle assen gelijk zijn:

Dan

met het kwadraat van de afstand van het punt r tot de oorsprong. De integratie is het makkelijkst in bolcoördinaten. Het volume-element is gelijk aan


terwijl loopt van 0 tot . Dan volgt

Oppervlaktetraagheidsmoment
Zie Oppervlaktetraagheidsmoment voor het hoofdartikel over dit onderwerp.De term traagheidsmoment wordt ook wel gebruikt voor het oppervlaktetraagheidsmoment dat de weerstand tegen doorbuiging bepaalt. Het oppervlaktetraagheidsmoment (dimensie: lengte tot de vierde macht) wordt gebruikt bij sterkteberekeningen aan constructies. Een andere term is de kwadratische oppervlaktemoment.
Bronnen, noten en/of referenties
|

Grootheden en eenheden in de (klassieke) mechanica
| lineaire/translatie grootheden | ||||||||
| Wat meten tijdsintegralen? | 'nabijheid' ('nearness') | 'verheid' ('farness') | ||||||
|---|---|---|---|---|---|---|---|---|
| Dimensie | L−1 | 1 | L | L2 | ||||
| T9 | presrop (Engels) m−1·s9 | absrop (Engels) m·s9 | ||||||
| T8 | presock (Engels) m−1·s8 | absock (Engels) m·s8 | ||||||
| T7 | presop (Engels) m−1·s7 | absop (Engels) m·s7 | ||||||
| T6 | presackle (Engels) m−1·s6 | absrackle (Engels) m·s6 | ||||||
| T5 | presounce (Engels) m−1·s5 | absounce (Engels) m·s5 | ||||||
| T4 | preserk (Engels) m−1·s4 | abserk (Engels): D m·s4 | ||||||
| T3 | preseleration (Engels) m−1·s3 | abseleration (Engels): C m·s3 | hoek/rotatie grootheden | |||||
| T2 | presity (Engels) m−1·s2 | absity (Engels): B m·s2 | Dimensie | 1 | geen (m·m−1) | geen (m2·m−2) | ||
| T | presement (Engels) m−1·s | tijd: t s | absition/absement (Engels): A m·s | T | tijd: t s | |||
| 1 | placement (Engels) golfgetal m−1 | afgelegde weg: d plaatsvector: r, s, x afstand: s m | oppervlakte: A m2 | 1 | hoek: θ rad | ruimtehoek: Ω rad2, sr | ||
| Wat meten tijdsafgeleiden? | 'rasheid' ('swiftness') | |||||||
| T−1 | frequentie: f s−1, Hz | snelheid (scalar): v snelheid (vector): v m·s−1 | kinematische viscositeit: ν diffusiecoëfficiënt: D specifiek impulsmoment: h m2·s−1 | T−1 | frequentie: f s−1, Hz | hoeksnelheid: ω, ω rad·s−1 | ||
| T−2 | versnelling: a m·s−2 | verbrandingswarmte geabsorbeerde dosis: D radioactieve-dosisequivalent m2·s−2, J·kg−1, Gy, Sv | T−2 | hoekversnelling: α rad·s−2 | ||||
| T−3 | ruk: j m·s−3 | T−3 | hoekruk: ζ rad·s−3 | |||||
| T−4 | jounce/snap (Engels): s m·s−4 | |||||||
| T−5 | crackle (Engels): c m·s−5 | |||||||
| T−6 | pop (Engels): Po m·s−6 | |||||||
| T−7 | lock (Engels) m·s−7 | |||||||
| T−8 | drop (Engels) m·s−8 | |||||||
| M | lineaire dichtheid: kg·m−1 | massa: m kg | ML2 | massatraagheidsmoment: I kg·m2 | ||||
| Wat meten tijdsafgeleiden? | 'sterkheid' ('forceness') | |||||||
| MT−1 | dynamische viscositeit: η kg·m−1·s−1, N·m−2·s, Pa·s | impuls: p (momentum), stoot: J, p (impulse) kg·m·s−1, N·s | actie: 𝒮 actergie: ℵ kg·m2·s−1, N·m·s, J·s | ML2T−1 | impulsmoment (momentum angularis): L kg·m2·s−1 | actie: 𝒮 actergie: ℵ kg·m2·s−1, N·m·s, J·s | ||
| MT−2 | druk: p mechanische spanning: energiedichtheid: U kg·m−1·s−2, N·m−2, J·m−3, Pa | oppervlaktespanning: of kg·s−2, N·m−1, J·m−2 | kracht: F gewicht: Fg ·kg·m·s−2, N | energie: E arbeid: W warmte: Q kg·m2·s−2, Nm, J | ML2T−2 | krachtmoment (torque): M, τ kg·m2·s−2, Nm | energie: E arbeid: W warmte: Q kg·m2·s−2, Nm, J | |
| MT−3 | yank (Engels): Y kg·m·s−3, N·s−1 | vermogen: P kg·m2·s−3, W | ML2T−3 | rotatum: P kg·m2·s−3, N·m·s−1 | vermogen: P kg·m2 ·s−3, W | |||
| MT−4 | tug (Engels): T kg·m·s−4, N·s−2 | |||||||
| MT−5 | snatch (Engels): S kg·m·s−5, N·s−3 | |||||||
| MT−6 | shake (Engels): Sh kg·m·s−6, N·s−4 | |||||||




Elementaire begrippen in de mechanica
| Lineaire grootheid: | (bewegings)snelheid · versnelling · ruk | massa | impuls · stoot · kracht |
| Rotatiegrootheid: | hoeksnelheid · hoekversnelling | traagheidsmoment | impulsmoment · krachtmoment |
| Overig: | eenparige beweging · eenparig versnelde beweging · verplaatsing · rotatie · koppel (natuurkunde) · koppel (aandrijftechniek) · moment en koppel · gewicht |










